Kursiniai darbai
Roboto projektavimas




















Veleno projektavimas…………… 35
Guolių parinkimas 39
Literatūra…………………………………………………………………………… 41
Įvadas
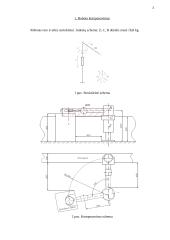
Šiame robotų kursiniame darbe – atlikti pramoninio roboto, skirto detalei perkelti nuo gręžimo staklių ant frezavimo staklių projektiniai skaičiavimai.
Projektuojamo manipuliatoriaus kinematinė struktūra: C, A, X. Tai yra, projektuojamas robotas turės sukamąjį judesį C apie ašį z, sukamąjį judesį A apie ašį x ir slenkamąjį judesį X išilgai x ašies.
Projektuojamas robotas aptarnaus gręžimo stakles, frezavimo stakles ir juostinį konvejerį, kurio viena puse transportuojami ruošiniai į roboto darbo zoną, o kita puse transportuojamos apdirbtos detalės.
Projektuojamas robotas turės į gręžimo ir frezavimo stakles paduoti cilindrinius ruošinius, kurių skersmuo d=114mm, o masė – 7,5kg.
Šiame kursiniame darbe atlikti šie skaičiavimai:
1. Konstrukcinės komponavimo schemos sudarymas.
2. Roboto darbo zonos nustatymas ir jo grandžių posūkių bei poslinkių nustatymas.
3. Orientavimo mechanizmo ir jo griebto projektavimas.
4. Roboto laikančios mechaninės sistemos deformacijų nustatymas.
5. Posūkio mechanizmo projektavimas.
Taip pat prie kursinio darbo pridedami ir brėžiniai:
1. Roboto bendras vaizdas.
2. Posūkio mechanizmo darbo brėžinys.
Konstrukcinės komponavimo schemos sudarymas
Pagal duotą kinematinę struktūrą ( c, a, x ) sudarau kinematinę schemą:
1 pav. Roboto kinematinė schema.
2 pav. Naudojama koordinačių sistema.
Roboto darbo zonos ir jo grandžių posūkių bei poslinkių nustatymas, greičių bei pagreičių skaičiavimas
Pagal nurodytas koordinates bus atliekami tokie judesiai:
Sukamasis judesys c apie ašį z, sukamasis judesys a apie ašį x, slenkamasis judesys išilgai x ašies.
Apskaičiuojame ruošinio ilgį (aukštį):
V=r2h=m/; =7800kg/m3;
r =0,057m; m=7,5kg;
h=m/(r2)=7,5/(7800*3.14*0,0572)=0,094m=94mm;
3 pav. Roboto schema iš šono.
4 pav. Roboto schema iš viršaus.
Skaičiavimams bus naudojami šių įrengimų duomenys:
1. Gręžimo staklės 2125;
2. Frezavimo staklės 6T11.
Roboto grandžių poslinkių nustatymas
Pagal nurodytą koordinačių sistemą nustatau tokius roboto grandžių poslinkius:
Posūkis apie z ašį
180
Posūkis apie x ašį
180
Išilgai x ašies
600 mm
Greičių ir pagreičių skaičiavimas
Greičių apskaičiavimams bus naudojamos formulės:
vvid = KSi / (tžm– ( td /nr )) ; ( tiesialinijiniam judesiui );
čia K – darbo našumo padidėjimo koeficientas, žmogų pakeičiant robotu ( K = 1,2 … 7 ), K=3 priimu;
Si – poslinkis, kuriam naudojamas greitis vvid ;
tžm – žmogaus darbo laikas;
td – detalės užspaudimo...
Šį darbą sudaro 2465 žodžiai, tikrai rasi tai, ko ieškai!
★ Klientai rekomenduoja
Šį rašto darbą rekomenduoja mūsų klientai. Ką tai reiškia?
Mūsų svetainėje pateikiama dešimtys tūkstančių skirtingų rašto darbų, kuriuos įkėlė daugybė moksleivių ir studentų su skirtingais gabumais. Būtent šis rašto darbas yra patikrintas specialistų ir rekomenduojamas kitų klientų, kurie po atsisiuntimo įvertino šį mokslo darbą teigiamai. Todėl galite būti tikri, kad šis pasirinkimas geriausias!
Norint atsisiųsti šį darbą spausk ☞ Peržiūrėti darbą mygtuką!
- Mechanikos kursinis darbas
- 41 psl., (2465 ž.)
- Word failas 3 MB
- Lygis: Universitetinis
Mūsų mokslo darbų bazėje yra daugybė įvairių mokslo darbų, todėl tikrai atrasi sau tinkamą!
![]() Panašūs darbai
Panašūs darbai











Privalumai
Atsisiuntei rašto darbą ir neradai jame reikalingos informacijos? Pakeisime jį kitu nemokamai.
Pirkdamas daugiau nei vieną darbą, nuo sekančių darbų gausi 25% nuolaidą.
Išsirink norimus rašto darbus ir gauk juos akimirksniu po sėkmingo apmokėjimo!
Atsiliepimai





