Kursiniai darbai
Roboto komponavimas




















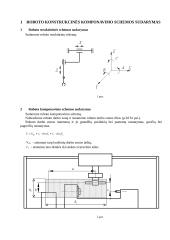
1. Roboto komponavimas Robotas rato ir ašies surinkimui. Judesių schema: Z, C, B detalės masė 16,8 kg. 1 pav. Struktūrinė schema 2 pav. Komponavimo schema 2. Kinematiniai skaičiavimai Roboto judesių laikai 1 lentelė. Žmogaus judesių laikai ir roboto eigos Žmogaus judesys Žmogaus laikas t, s Roboto judesys Roboto eiga m (rad) Sugriebimo laikas to. s 1. Pasisukti link konvejerio 2. Prieiti prie konvejerio 3. Ištiesti ranką link ruošinio 4. Paimti detalę 5. Atitraukti ranką nuo konvejerio 6. Pasisukti 100 link stalo 7. Apversti detalę 8. Prieiti prie stalo 9. Ištiesti ranką iki staklių 10. Centruoti detalę 11. Paleisti detalę 12. Atitraukti ranką iš darbo zonos 13. Pasisukti 10 iki prad padėties 14. Grįžti į pradinę padėtį 0,5 4,0 0,42 0,264 0,5 1,63 1,1 4,0 0,42 0,97 0,072 0,5 0,1 4,0 1. Pasisuka link konvejerio (pasisuka C) 2. Nuleidžia griebtuvą link ruošinio Z žemyn 3. Sugriebti 4. Pakelia ranką su detale (Z aukštyn) 5. Pasisuka link stalo (pasisuka C) 6. Apverčia detalę (pasuka B) 7. Nuleidžia ranką su detale (Z žemyn) 8. Orentuojama detalė 9. Atleisti 10. Pakelti ranką (Z aukštyn) 11. Mechanizmas grįžta į pradinę padėtį (0,872) 0,25 – 0,25 (1,745) (3,14) 0,1 (0,07) – 0,1 (0,872) 0,3 0,3 Iš viso 18,48 Pagal komponavimo schemą nustatu roboto judesių eigas: Greičiai ir pagreičiai Vidutiniai judesių greičiai (1–25) Čia: Si – judesio eiga m, Kn – norminis darbo našumo padidėjimo koef., tžm – žmogaus atliekamo judesio laikas s, to – manipuliuojamo objekto sugriebimo ir atleidimo laikas s, n – roboto judesių skaičius darbo ciklo metu. Maksimalūs eigų greičiai (1–26) Čia: Kv – vidutinio greičio padidėjimo koef. stakles aptarnaujantiems robotams (1–26). Vidutiniai eigų pagreičiai (1–27) Čia: tįs – elektrinių pavarų įsibėgėjimo laikas s. Maksimalūs eigų pagreičiai (1–27) Čia: Ka – pagreičio padidėjimo koef. elektrinėse pavarose. Rankos galo linijinis pagreitis sukantis pavarai C: Čia: r – manipuliuojamo objekto didžiausias atstumas nuos sukimosi centro m. Skaičiuojamoji keliamoji galia Skaičiuojamoji keliamoji galia įvertina roboto griebtuvo masę ir griebtuvo pavaros masę (1–41) Čia: mo – manipuliuojamo objekto masė kg, Kg – griebtuvo masės koef., Kp – griebtuvo pavaros masės koef. Priimu standartinę keliamąją galią m=25 kg (1–15). Detalės matmenų nustatymas Detalės masė: Čia ρ – plieno tankis kg/mm3. Detalės ilgis (storis), kai žinomas skersmuo: 3 pav. Detalės eskizas Orientavimo mechanizmo masė Orientavimo pavaros masė (1–35): Čia: kp – banginės pavaros koef., kl – laisvės laipsnių skaičiaus koef., km – korpuso medžiagos koef., kt – tarpelio naikinimo įtaiso koef. Pavaros apkrovimo momentas: Orientavimo pavaros veikimo petys (1–54): Čia – koef., įvertinantis detalės masę ir roboto paskirtį (1–54). 3. Mechaninės laikančiosios sistemos projektavimas Pradinis projektavimas Inercijos jėgų veikiama mechaninė laikančioji sistema deformuojasi. Ši deformacija stakles aptarnaujantiems pramoniniams robotams neturi viršyti 1 mm (1). Inercijos jėgos skaičiuojamos judant pavarai, kuomet juda daugiausiai sistemos elementų didžiausiu pagreičiu. Šiuo atveju tai pavara C. Inercijos jėga, veikianti detalę ir griebtuvą: Čia: m – detalės ir griebtuvo masė kg, r – sukimosi spindulys m. Inercijos jėga, veikianti orientavimo mechanizmą: 4 pav. Skaičiavimo schema 5 pav. Pirmo taško koordinatės 6 pav. Antro taško koordinatės 7 pav. Trečio taško koordinatės 8 pav. Ketvirto taško koordinatės 9 pav. Nulinės strypo skerspjūvis 10 pav. Pirmos strypo skerspjūvis 11 pav. Antros strypo skerspjūvis 12 pav. Detalę veikianti jėga 13 pav. Orientavimo mechanizmą veikianti jėga Skaičiavimo rezultatai 15 pav. Didžiausi įtempimai ir deformacija 16 pav. Įtempimų pasiskirstymo diagrama 17 pav. Erdvinis konstrukcijos modelis Patikslintas projektavimas Mechaninės laikančiosios sistemos atskirų elementų masės Čia: Fi – elemento skerspjūvio plotas mm2 iš APM Winframe duomenų lentelės, li – elemento ilgis m, ρ – plieno tankis kg/m3. Svorio jėgos: Čia: g – laisvo kritimo pagreitis m/s2. Pavarų masės priimamos 20 kg. Pavarų svorio jėgos: Svorio jėgos, veikiančios atitinkamai atitinkamai griebtuvą ir orientavimo mechanizmą: Inercijos jėgos judant pavarai Z: Suminės jėgos z ašies kryptimi: Inercijos jėgos judant pavarai C: Čia – atstumas nuo sukimosi centro iki svorio centro m. Inercijos jėgų momentai judant pavarai C: Čia – inercijos spindulys m. Inercijos jėgų momentai judant pavarai B: Čia – inercijos spindulys m. Inercijos jėgos judant orientavimo pavarai: 18 pav.Jėgų schema 19 pav. Skaičiavimo schema 20 pav. Detalę veikiančios jėgos 21 pav. Orientavimo pavarą veikiančios jėgos 22 pav. Pavaras Z, C ir B veikiančios suminės jėgos 23 pav. Nulinį strypą veikianti jėga 24 pav. Pirmą strypą veikiančios jėgos 25 pav. Pirmą strypą veikiantis jėgų momentas 26 pav. Antrą strypą veikiančios jėgos 27 pav. Antrą strypą veikiantis jėgų momentas Skaičiavimo rezultatai 28 pav. Didžiausi įtempimai ir deformacija Išvada: deformacija neviršija 1 mm, todėl sistemos standumas laikomas pakankamu. 29 pav. Įtempimų pasiskirstymo diagrama 30 pav. Nulinio strypo lenkimo momentai vertikalioje plokštumoje 31 pav. Nulinio strypo lenkimo momentai horizontalioje plokštumoje 32 pav. Nulinio strypo sukimo momentai 33 pav. Pirmo strypo lenkimo momentai vertikalioje plokštumoje 34 pav. Pirmo strypo lenkimo momentai horizontalioje plokštumoje 35 pav. Pirmo strypo sukimo momentai 36 pav. Antro strypo lenkimo momentai horizontalioje plokštumoje 37 pav. Antro strypo sukimo momentai 38 pav. Antro strypo sukimo momentas 3.3. Skaičiavimas su dinamine apkrova 39 pav. Skaičiavimo schema 40 pav. Didžiausi įtempimai ir deformacija 41 pav. Nulinio strypo ašinė jėga, atitinka Z pavaros apkrovą. 42 pav. Nulinio strypo sukimo momentas, atitinka C pavaros apkrovą. 43 pav. Pirmo strypo sukimo momentas, atitinka B pavaros apkrovą. 44 pav. Antro strypo lenkimo momentas, atitinka orientavomo pavaros apkrovą. 4. Pavarų projektavimas 4.1. Kinematiniai skaičiavimai 3 lentelė. Pavarų apkrovos Pavara Apkrova Greitis Z 911 N 1,026 m/s C 354 Nm 2,01 rad/s B 24,4 Nm 2,01 rad/s Orientavimo 64,5 Nm 2,02 rad/s Pavarų apkrovas imu iš skaičiavimų programa WinFrame, kai veikia dinaminė apkrova. Z pavara Parenku hidraulinę pavarą, nes pavaros eiga 250 mm. Reikalingas hidrocilindro skersmuo: Čia: p – slėgis hidrosistemoje MPa, η – n.v.k., dk – koto skersmuo mm. Priimu dc=40 mm. Patikrinu leistiną didžiausią eigą: 45 pav. Pavaros kinematinė schema C pavara Reikalinga variklio galia Čia: η – pavaros n. v. k. Variklio veleno dinaminis momentas: rad/s Pavaros judančių grandžių inercijos momentas Čia: mi – grandžių masės kg, r – masių inercijos spindulys m. Atraminės reakcijos ratukuose Čia: Mi – pavaros veleno lenkimo momentas Nm iš Winframe skaičiavimo, b – apytikris atstumas tarp guolių m. Apytikslis veleno skersmuo Trinties momentas ratukų guoliuose [1–112] Čia: c, f0 – rutulinio radialinio guolio tipo koef., d – apytikris veleno skersmuo mm. Reikalingas pavaros perdavimo skaičius [1–68] Priimu i=60 ir parenku sliekinį reduktorių, nes i
Šį darbą sudaro 1518 žodžiai, tikrai rasi tai, ko ieškai!
★ Klientai rekomenduoja
Šį rašto darbą rekomenduoja mūsų klientai. Ką tai reiškia?
Mūsų svetainėje pateikiama dešimtys tūkstančių skirtingų rašto darbų, kuriuos įkėlė daugybė moksleivių ir studentų su skirtingais gabumais. Būtent šis rašto darbas yra patikrintas specialistų ir rekomenduojamas kitų klientų, kurie po atsisiuntimo įvertino šį mokslo darbą teigiamai. Todėl galite būti tikri, kad šis pasirinkimas geriausias!
Norint atsisiųsti šį darbą spausk ☞ Peržiūrėti darbą mygtuką!
- Mechanikos kursinis darbas
- 52 psl., (1518 ž.)
- Word failas 3 MB
- Lygis: Universitetinis
Mūsų mokslo darbų bazėje yra daugybė įvairių mokslo darbų, todėl tikrai atrasi sau tinkamą!
![]() Panašūs darbai
Panašūs darbai




![]() Kiti darbai
Kiti darbai











Privalumai
Atsisiuntei rašto darbą ir neradai jame reikalingos informacijos? Pakeisime jį kitu nemokamai.
Pirkdamas daugiau nei vieną darbą, nuo sekančių darbų gausi 25% nuolaidą.
Išsirink norimus rašto darbus ir gauk juos akimirksniu po sėkmingo apmokėjimo!
Atsiliepimai





